Handle
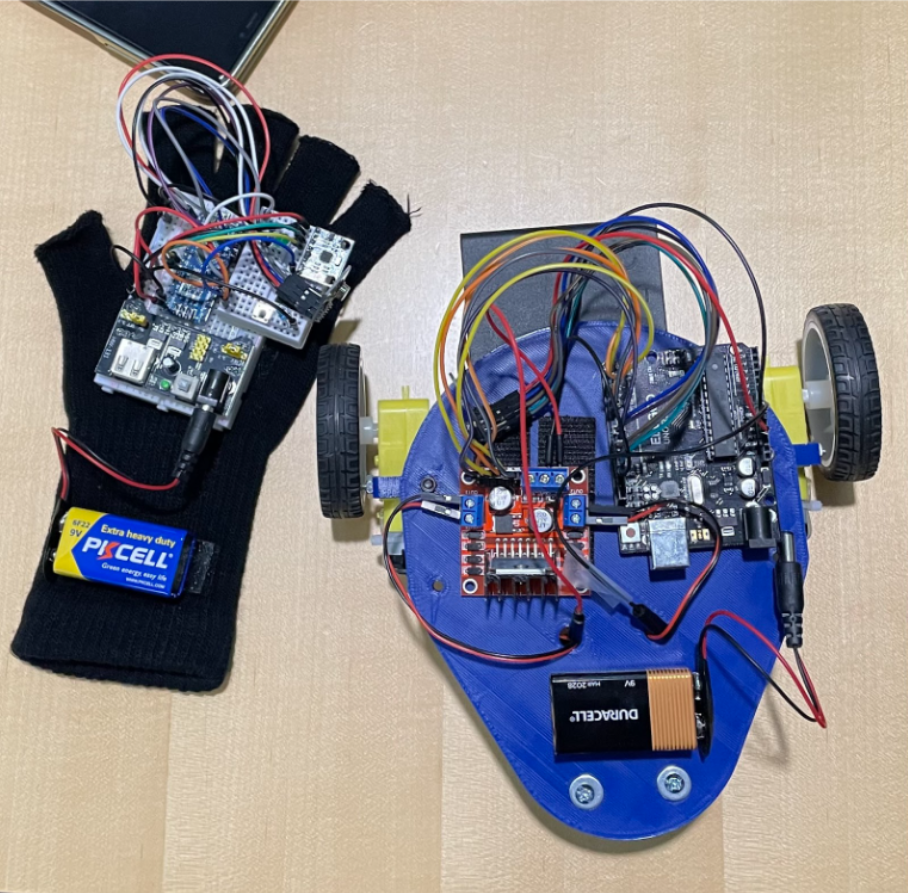
The Handle project aimed to make a differential drive robot remotely controlled via hand motions. The robot's control was connected
by transcievers to a glove where certain hand motions were mapped to specific movements in the robot.
Movement of the glove was detected with an MPU-6050 unit. Two transcievers, one on the glove and robot respectively, connected
the two components so that when the MPU-6050 detected motion or rotation, the robot's two DC TT motors would rotate the wheels accordingly.
The device's radio range, about 100 feet or so, is more than enough for the scope of the project.
The robot's speed is also good for the scope of the project.
However, the robot's capabilities are hindered by input lag between the glove controller and the robot,
with delays ranging from as little as one second to as much as ten or fifteen seconds.
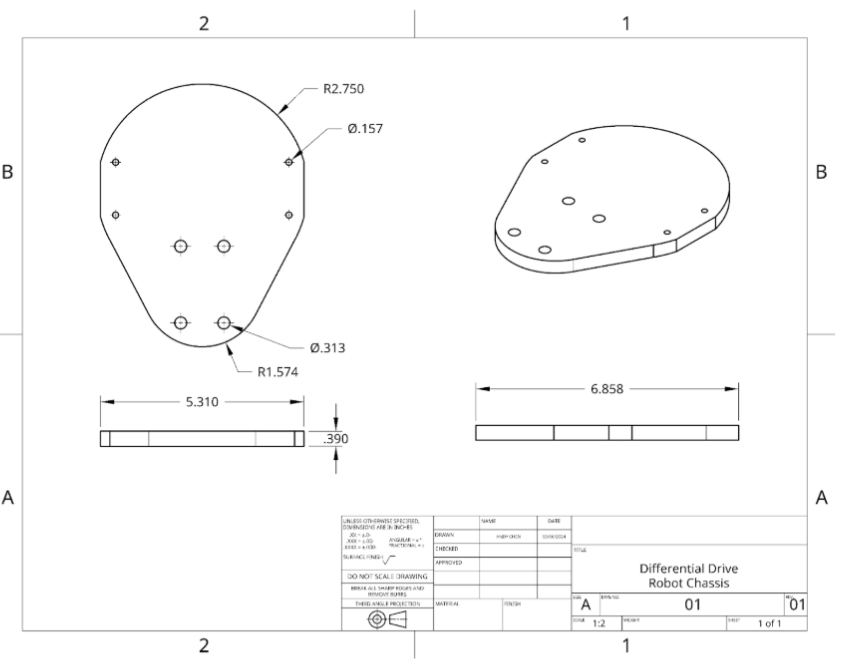
The robot's chassis also has its shortcomings, with the wheels fanning out due to the weight of the robot.
The motor mounts could have been better designed to account for the weight and fanning.